A summary:
The high-voltage brushless motor driver is a high-power driver independently developed for the purpose of cooperating with the field of modern industrial automatic control. It mainly adopts the high-performance brushless dc motor driver chip from foreign countries, which has a series of advantages such as high integration, small size, perfect protection, simple and clear wiring and high reliability.The drive is suitable for small and medium brushless dc motors with rated power up to 400W.This driver adopts the new PWM technology, which makes the brushless motor run faster, vibrate less, noise less, stable and reliable.
Product features:
1. System features:
Input power AC85~265VAC 50/60hz
Continuous output current: 2.5a, suitable for brushless motors below 550W
Maximum output current: 5.0a
Use temperature 0 ~ + 45 ° C
Save - 20 ~ + 85 ° C temperature
Use and storage humidity<85% [no frost conditions]
Construction of wall-mounted box type
2. Basic features
Cooling mode: radiator mode
Input and output signals of control letters: fully isolated
Protection machine can: over current, over speed, over voltage, under voltage control power supply abnormal
3. Installation precautions
* it is strictly prohibited to open the shell to measure or touch any device and connector on the bottom board during operation.
* check the bottom plate or replace the fuse one minute after power failure.
* it is forbidden to run the drive without shell during operation.
* brushless motor driver and brushless motor shall be well and reliably grounded, otherwise the speed of brushless motor may not be stable.
* if the drive is accidentally damaged during operation, the company is only responsible for the repair and replacement of the drive within the warranty.The company shall not be liable for any loss of control of the motor or loss of life or property caused by accidental damage of the drive.
Mounting dimensions 165*102*52mm
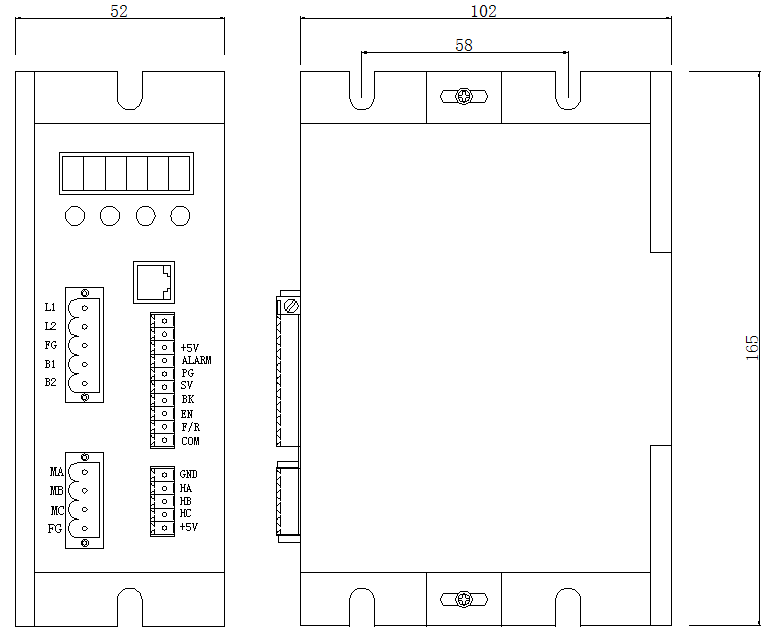
Four.Interface and control signals
Control interface
numerical order | name | explanation
|
1 | obligate | The reserved ports |
2 | obligate | The reserved ports |
3 | +5V | +5V Power output port |
4 | alarm | Alarm output |
5 | PG | Speed signal output terminal |
6 | BK | Control signal brake end (corresponding to COM) |
7 | EN | Start stop (corresponding to COM) |
8 | SV | Analog signal input port |
9 | F/R | Forward and reverse control end (corresponding to COM) |
10 | COM | The public port |
Brushless motor hall sensor signal terminal
numerical order | name | explanation
|
1 | GND | Hall sensor power supply ground wire |
2 | HA | Hall sensor A phase |
3 | HB | Hall sensor B phase |
4 | HC | Hall sensor C phase |
5 | +5V | Hall sensor power input terminal |
Power and motor terminals
numerical order | name | explanation
|
1 | L1 | Ac 220 vac |
2 | L2 | Ac 220 vac |
3 | FG | ground electrode |
4 | B1 | Reserve the external brake resistance port |
5 | B2 | Reserve the external brake resistance port |
numerical order | name | explanation
|
1 | MA | Motor winding A phase (MA) |
2 | MB | Motor winding B phase (MB) |
3 | MC | Motor winding c-phase (MC) |
4 | FG | ground electrode |
V. function and use
Speed way
This driver provides the following speed regulation mode:
Panel speed regulation: by setting the internal speed parameters of the driver to achieve different speed.
External input speed will be an external potentiometer two fixed end connect to the GND and + 5 v end of the drive, will adjust the termination in the SV side can use an external potentiometer (5 k to 100 k) speed regulation, can also be controlled by other units (such as PLC, SCM, etc.) input analog voltage to the SV to achieve speed control (relative to the GND), SV port to accept in the range of DC OV ~ + 5 v, corresponding to the motor speed of 0 ~ rated speed.
Can also use external digital signal speed regulation: between SV and GND can be applied to the amplitude of 5V, frequency of 1KHz~2KHz pulse width digital signal (PWM) for speed regulation, motor speed by its duty cycle linear regulation.At this time, the amplitude of SV digital signal can be attenuated by 0-1.0 ratio by adjusting r-sv potentiometer. Generally, the r-sv is adjusted to 1.0, and the input digital signal of SV is not attenuated.
Motor operation/stop control (EN)
The on and off of the control terminal EN relative to GND can control the operation and stop of the motor.When the terminal is disconnected, the motor will stop.When the running/stopping end is used to control the motor to stop, the motor will stop naturally, and its motion law is related to the load inertia.
Motor forward/reverse control (F/R)
By controlling the on and off of terminal F/R and terminal GND, the running direction of the motor can be controlled.When F/R and terminal GND are not connected, the motor will run clockwise (facing the motor shaft), otherwise, the motor will run counterclockwise.In order to avoid the damage of the driver, when changing the motor steering, the motor should be stopped before changing the steering to avoid operating in the direction of the motor operation.
Brake stop
By controlling the on and off of terminal BK and terminal GND, the motor's braking and stopping can be controlled.When the control terminal BK is disconnected from the terminal GND, the motor runs, and when the motor is connected, the quick braking stops, and the braking shutdown is faster than the natural shutdown. The specific shutdown time is related to the load inertia of the user system.If there is no special stop requirement, natural stop should be adopted because the stop of braking has impact on electrical and machinery.
Motor speed signal output (PG)
The speed pulse output, the port for OC output (30 v / 10 ma Max), to get a signal with the power of the indirect 3 k Ω ~ 10 k Ω pull-up resistor.The terminal will output frequency and motor speed is proportional to the fixed pulse width (50uS) negative pulse string, motor per revolution of the output pulse number of 3 x N, N is the number of motor poles.Example: two pulses per revolution of a 2-pole, or quadrupole, motor.When the motor speed is 500 RPM, the output pulse of terminal PG is 1000.
Alarm output
Driver alarm output, the port is OC output (30V/10mA Max).To get a signal with the power of the indirect 3 k Ω ~ 10 k Ω pull-up resistor.When alarming, this terminal conducts with GND (low level), and at the same time, the driver stops working by itself and is in the alarming state.
Driver failure
The drive will automatically stop working and the motor will stop. The blue light on the drive is flashing. As long as the enabling end is reset (that is, EN is disconnected from GND) or the power is cut off, the drive can remove the alarm.Please check the motor wiring in case of this fault.
Wiring diagram of driver and brushless motor
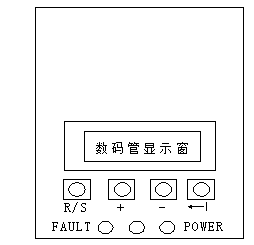
Vi. Display and keyboard operation
Note: "R/S" : represents start/stop (return key)
"+" : add 1 to the value of the parameter when setting the parameter
"-" : when parameters are set, the value of the parameter is reduced by 1
: ENTER
The key position is shown in the figure above:
6.1 system parameter setting method:
1. The system parameter setting must be in the state when the motor is stopped, that is, when the motor is in the stop state in panel mode or in the enable disconnection state in external port mode. In the case of standby, press "ENTER";Will call up system parameters, and then press ENTER key, will call up the setting value of system parameters.
2. Press "+" or "-" key to set the parameter you want to modify.If you do not want to change the "R/S" key to jump out of the setting, back to the standby state.
3. Press "ENTER" key again to see the parameter content.If you do not want to change the "R/S" key to jump out of the setting, back to the standby state.
4. Press the "+" or "-" key to adjust the parameter value you want to modify.
5. Press "ENTER" to store parameters, and press R/S to return to standby state.
Description: in the setting state, if no button is pressed for one minute, it will automatically jump to the speed display interface.
6.2 working mode:
There are two working modes of the driver, which can be set by the panel.Second is the external port working mode;Motor in accordance with the setting mode, digital tube display motor speed.In the working mode of the panel, press R/S key to start and stop the motor, long press + and - keys to increase and decrease the motor speed, and press given ENTER key to determine the motor speed.The motor runs at the set speed.
6.3 protection mode:
When the motor is abnormal during operation, the digital tube displays Err.
(1)Err1 means the motor is stuck.
Err2 represents over current.
(3)Err3 means hall fault.
Err4 represents input undervoltage.
Err5 means input overvoltage.
Err6 represents input peak current protection
Description: 6.4
(1)POWER indicator light
Light indicates normal power supply;Off means abnormal power supply;
(2)FAULT status indicator light
Off means setting mode;Light indicates the working mode;Flash indicates protection mode.
6.5 drive detailed parameter Settings:
P00X Group: system operation parameters |
function code | name | range | unit | The factory set up | change |
P000 | Control mode setting |
00 is the external port control mode
01 is the panel control mode
03 RS485 communication port control |
| 00 External port control mode |
|
P001 | Polar logarithmic setting | 1~99 | antipode | 2 | ○ |
P002 | Rated speed setting | 1~9999 Valid for external port mode | RPM | 3000 | ○ |
P003 | Maximum current setting | 0.5~5.0 | A | 3.5 | ○ |
P004 | Panel speed | 0~ Rated speed is only available for panel mode | RPM | 3000 | ○ |
P005 | Startup time Settings | 0.2~10.0 | S | 2.0 | ○ |
P006 | Stop time setting | 0.2~10.0 | S | 2.0 | ○ |
P007 | Open and closed loop control | 00 open loop 01 close loop |
| 01 close loop | ○ |
P008 | Inductive/non-inductive control | 00 noninductive 01internal inductance |
| 01 thoughts on |
|
P009 | Display mode Settings | 00Display real-time speed 01Display real time current (DC) |
| 00 |
|
P00A | Non-inductive starting initial speed | 0-FFFFH | hexadecimal | 0300H | unalterable |
P00B | Non-inductive starting torque | 0-FFH | hexadecimal | 60H | unalterable |
P00C | reserved | 0-FFH | hexadecimal | 10H | unalterable |
P00D | Motor hall Angle selection | 120degree:00 60degree:01 |
| 00 | unalterable |
P00E | reserved | 0-FFH | hexadecimal | 00 | unalterable |
P00F | reserved | 0-FFH | hexadecimal | 00 | unalterable |
Note: after the parameter modification and saving of P007 and P008 is completed, the driver must be disconnected and restarted before entering the state of setting control mode.AC current == display real-time DC current/power factor Q.
Vi. System usage
First connected to the motor and drive in the attachment (motor winding lines, signal lines and power cord) hall, must be in strict accordance with the requirements of attachment, not like asynchronous motor by changing the wiring direction to turn, can lead to incorrect wiring is abnormal motor, or is not running, the main performance brush motor vibration or fever quickly (tens of seconds to two minutes, the temperature rise to 80 degrees c), and will damage the motor and drive.
Motor when the motor winding line, hole lines connect the power cord and drivers, can run, potentiometer to set the minimum first, and then press start switch, potentiometer slightly increase motor, the motor should be run, such as the motor is not running, or shiver, likely for motor line phase sequence is wrong, please check the order of the brushless motor fuses, again until it can realize the normal movement of the motor, stop.
Vii. Communication method:
The communication mode adopts standard Modbus protocol and conforms to national standard GB/T 19582.1 -- 2008.RS484 based double wire serial link communication is used, and the general telephone port is adopted for the physical interface. Connection 6 corresponds to A, connection 3 to B, and connection 8 to GND. The serial connection is very convenient.Transmission mode RTU, validation mode CRC, CRC start word FFFFH.Data mode 8 bit asynchronous serial, 2 stop bit, no effect bit, support a variety of communication rates (see the parameters table).
Note: if communication mode is required to control the motor, it must be carried out in internal speed regulation mode.
Function parameters support 03H multi-register read, 10H multi-register write, 41H state query.
Register definition:
1000H: H: same as P000 L: open loop internal speed regulation value 0-100
L: high byte of speed regulation value inside the closed loop
1002H: H: undefined L: undefined
1003H: H: closed loop internal speed regulation maximum low position L: closed loop internal speed regulation maximum high position
1004H: H: bit definition 1: EN start and stop 2: BK brake 3: FR direction (note: other bits cannot be modified) L: alarm status 00: no alarm 81H: blocking rotation 82H: current 83H: hall 84H: low voltage
85H: high voltage 86H: peak current
1005H: H: real-time speed low order L: real-time speed high order
1006H: H: communication baud rate (same as P000E) L: undefined
1007H: H: site address L: parameter save trigger byte meaningless
1008 h - 100 fh: don't open
1010h-1012h: MAC address
Example :(data is in hexadecimal)
1. Query speed and status
Host sends 01 41 c0 10 return 01 41 00 08 0C 3A
Return real-time speed 00 00 (same register 1005H) control state 08(same register 1004H high byte)
Read the register value
Host sends 01 03 10 00 08 40 cc
Return from machine 01 03 10 00 01 02 03 32 31 B8 0B 08 00 00 00 00 00 0D 01 00 05 1B
3. Read register value 1000H 1001H
Host sends 01 03 10 00 02 c0 cb
Return from machine 01 03 04 00 01 02 03 EA 92
4. Read control bit 1004H
Host sends 01 03 10 04 00 01 C1 0B
Return from machine 01 03 02 0A 00 BE E4
5. Write control 1000H_H mode register, 1000H_L open loop speed, 1001H closed loop speed =L*256+H
Write speed is 2000
Host sends 01 10 10 00 02 04 01 D0 07 23 91
Return from machine 01 10 10 00 02 45 08
Write speed is 1000
Host sends 01 10 10 00 02 04 01 E8 03 31 92
Return from machine 01 10 10 00 02 45 08
6. Write control bit startup
Host sends 1 10 10 04 00 01 02 a 00 B0 B5
Return from machine 01 10 10 04 01 44 C8
7. Write control bit shutdown
Host sends 01 10 10 04 00 01 02 08 00 B1 D5
Return from machine 01 10 10 04 01 44 C8










轉(zhuǎn)平穩(wěn)")
")



