A summary:
High voltage brushless motor drive is my company independent research and development of high power drives, mainly USES the latest international motor special-purpose DSP as the core digital processor with a high speed digital logic chip high quality power module, component with high integration, small volume, perfect protection, wiring simple, high reliability etc.The driver can provide: operation panel speed setting, external analog voltage speed regulation, external potentiometer speed regulation, pulse width speed regulation and other functions.High-speed core control components control, with safe operation (control components and power components are fully isolated), flexible and diverse speed regulation, speed real-time display, complete protection functions, power components to provide hardware protection and other characteristics.
Product features:
1. System features:
Input power AC220VAC 50/60hz
Continuous output current: 4.9a, suitable for brushless motors below 1200W
Maximum output current: 9.9a,
Use temperature 0 ~ + 45 ° C
Save - 20 ~ + 85 ° C temperature
Use and storage humidity <85% [no frost conditions]
Construction of wall-mounted box type
2. Basic features
Cooling mode: radiator mode
Input and output signals of control letters: fully isolated
Protection machine can: over current, over speed, over voltage, under voltage control power supply abnormal
Panel interface: 6-bit LED display 4-bit key operation
3. Installation precautions
* it is strictly prohibited to open the shell to measure or touch any device and connector on the bottom board during operation.
* check the bottom plate or replace the fuse one minute after power failure.
* it is forbidden to run the drive without shell during operation.
* brushless motor driver and brushless motor shall be well and reliably grounded, otherwise the speed of brushless motor may not be stable.
* if the drive is accidentally damaged during operation, the company is only responsible for the repair and replacement of the drive within the warranty.The company shall not be liable for any loss of control of the motor or loss of life or property caused by accidental damage of the drive.
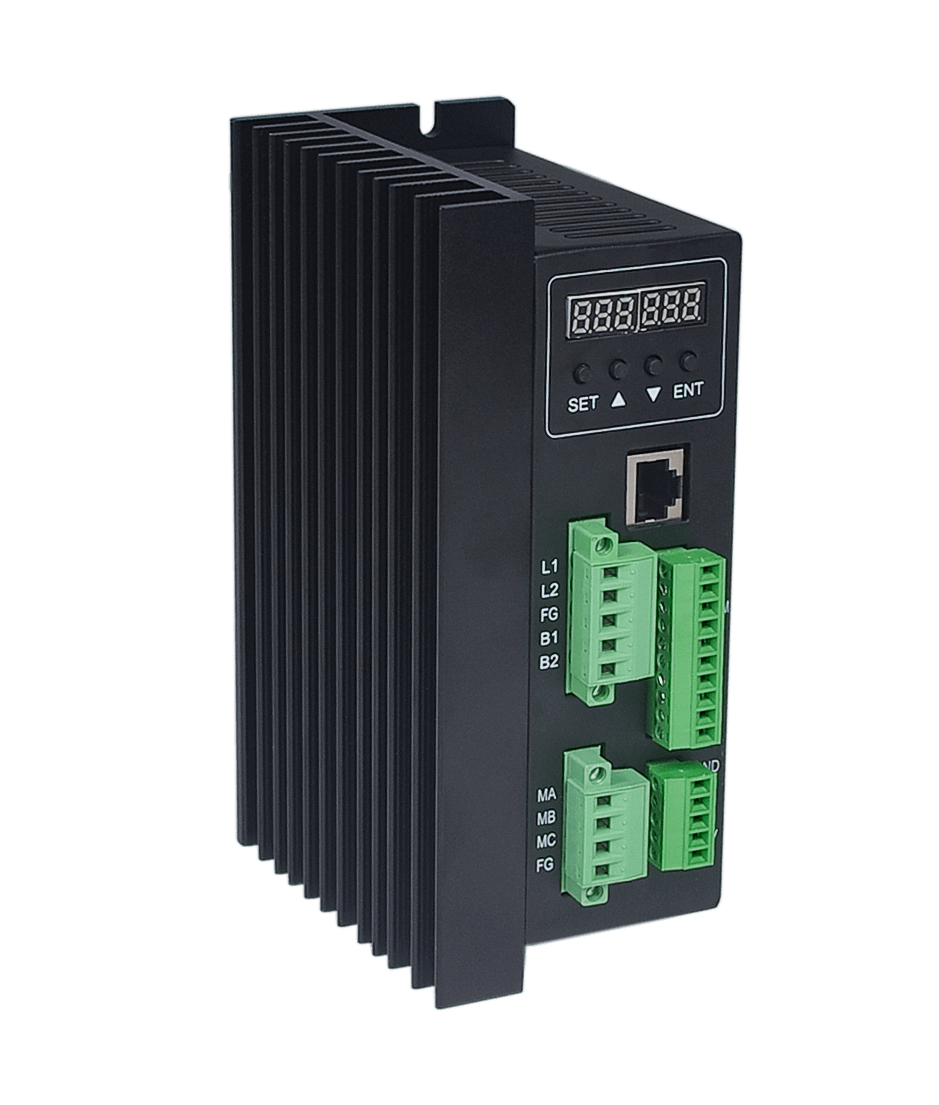
Ii. Function description of interface terminal
2.1 power and motor terminals
Terminals no. | Terminal symbols | signal name | function |
1 | L1(L)(R) | Main loop power input
| Main circuit power input terminal AC220V 50Hz, when using single-phase 220V should be connected to L1 and L2. |
2 | L2(N)(S) |
3 | L3(T) |
4 | P | High voltage direct current bus head | Drive internal dc bus positive end, rated voltage 315V |
5 | B1 | Internal brake resistance | Short connect B1 and B2 when using internal brake resistors.When the power of the internal brake resistance is insufficient and the external brake resistance is needed, disconnect B1 and B2 and connect the external brake resistance to P and B2. |
6 | B2 | External brake resistance |
7
| U(MA) | The motor output | Motor output terminals must correspond to the motor U, V and W terminals one by one. Note: do not reverse the motor by switching the three-phase terminals.This is quite different from asynchronous motors. |
8 | V(MB) |
9 | W(MC) |
| PE | protected area | Provide safe drain paths for motor and driver leakage current |
Drive size: 180 x 75 x 140 x

CN2端子定義
8:+5V +5V電源正極
7:SV 模擬量輸入端(調節速度)
6:COM 公共端負極
5:F/R 正�、反轉控制端
4:EN 啟動/停止
3:BK 剎車信號控制端
2:ALM 運行故障報警輸出
1:PG 速度信號輸出端
CN1端子定義:
5:GND 霍爾電源負極
4:HA 霍爾A
3:HB 霍爾B
2:HC 霍爾C
1:+5V 霍爾電源正極
Three: parameter setting
3.1Parameter P1
These parameters are used to set up some special custom functions and are usually used for users to adjust the process parameters themselves.The parameters of this part have nothing to do with the basic performance of the driver. They belong to the functional parameters of the application layer and are often adjusted according to the specific operation requirements of users.
name of parameter | Parameter number | Set value range | Factory default | function declaration |
Select display content | P1����。0 | 0~9 | 0 |
0 displays the current actual motor speed Display dc bus voltage Display input value of external analog quantity Display motor current 4 shows internal planning speed 5 U phase current 6 V phase current 7 W phase current 8 duty ratio 9 keep
|
Internal running speed | P1��。1 | 0~9999 | 2000 | When the internal speed is selected, the motor speed is determined by this parameter.See P1.2 |
Select the source of the speed signal | P1。2 | 0~2 | 1 | 0: internal instruction speed (tP1[0] is the internal speed, and MUP and MDOWN keys are used to speed up and decelerate the motor when it moves) 1: external port analog input, using the seventh pin SV signal of CN2 as the motor speed. 2: communication command control
|
Direction is set | P1。3 | 0~1 | 0 | 0: forward
1: reverse |
Select the start - stop signal source | P1。4 | 0~2 | 1 | 0: manual control by pressing the button (ENT key to start and stop, SET key to reverse motor motion direction, +/- key for acceleration and deceleration)
1: external port control, using the fourth pin signal of CN2 to start and stop the motor
2: communication command control |
Motor pole logarithm | P1。5 | 0~99 | 2 | Motor pole logarithm,
Note: motor pole number = motor pole number /2 |
驅動器地址 | P1���。6 | 0~255 | 0 | 使用通訊控制電機時驅動器的地址 |
速度比例因子 | P1。7 | 0~99999 | 1520 | 用于PID速度控制中的比例因子KP |
速度積分因子 | P1。8 | 0~99999 | 320 | 用于PID速度控制中的積分因子KI |
電機加速度 | P1�����。9 | 1~60000 | 6000 | 該參數和加速度成正比���,獲得的電機實際加速度和負載及電機等情況有關��。 |
電機減速度 | P1����。10 | 1~60000 | 6000 |
電機額定速度設定 | P1。11 | 0~99999 | 3000 | 單位轉/分鐘(RPM)當模擬量輸入為最大值時所對應的電機轉速�。 |
模擬輸入死區電壓 | P1�����。12 | 0~3300 | 100 | 單位毫伏,該參數用于設置電機零速度時對應的輸入電壓�。 |
手動速度調節當量 | P1���。13 | 1~999 | 1 | 內部速度模式時用按鍵改變速度的當量(按1下按鍵增減的轉速) |
恢復默認參數 | P1����。14 | 0~1 | 0 | 設為1并退出設置���,重新上電���,所有參數都會恢復為默認值 |
3.2面板操作方法
As shown on the left, there are four buttons on the panel, respectively
"SET" : "SET". Press this key to enter and exit the setting menu of P1 series.
"" and" ":" add "and" subtract "are respectively used to select the parameter number and adjust the parameter value, wherein" add "is the hot key to enter the test operation function.
"ENT" : "confirm" and "run". When setting parameters, the function of this key is to enter the parameter value adjustment interface and jump bits.In test run mode, this key is used to start and stop the motor operation.
Display description: a total of six digital tube display "888888", the most right is the first, is the lowest.
Note: if the value of the parameter you are trying to modify is greater than the maximum allowed value of the parameter, the change will not be allowed and the button will not respond.
3.3 how to set parameters
Examples:
Requirements: set internal speed (P1.1) to 1000 RPM.
The operation steps are as follows:
1.After power on, "H 0" is displayed, and the drive is in standby state. Press "SET".
Displays "P0.0 ".
2.Press the "SET" key to display "P1".0 ", the driver enters the setting state state of parameter P1.
Press the ' 'button until' P1 'appears.4 ".
4. Press "ENT" to display "2000", and the first digit on the far right flashes.
5. Press "ENT" key and the flicker bit moves forward to the 4th bit.
The 1000 setting is given by pressing the button.
7. Press "SET" to display "P1".4 ", parameter modification is completed and automatically saved.
8. Press "SET" again to display "P2 0".
9. Press "SET" key again to return to the standby state and display "H 0". At this point, the parameter modification is completed and the new parameter takes effect.
Note: after some parameters are modified, they cannot take effect until they are powered on again.
Note: the name marked with in the parameter table indicates that this parameter cannot be modified when the motor is running.
Note: if the value of the parameter you are trying to modify is greater than the maximum allowed value of the parameter, the change will not be allowed and the button will not respond.

Function and use
(1) speed regulation
The driver provides the following three speed regulation modes:
Analog voltage regulating external potentiometer can be two fixed end joint respectively in the drive control signal port of + 5 v and COM, will adjust the termination in the SV side can use an external potentiometer (10 k ~ 100 k) speed regulation, can also be controlled by other units (such as PLC, SCM, etc.) to the input analog voltage SV server-side implementation speed (relative to the COM), SV port to accept in the range of DC 0 v ~ + 5 v, corresponding to the motor speed of 0 ~ rated speed.
Can also use external digital signal speed regulation: between SV and GND can be applied to the amplitude of 5V, frequency of 1KHz~2KHz pulse width digital signal (PWM) for speed regulation, motor speed by its duty cycle linear regulation.
This driver can also adopt communication mode control.
(2) motor operation/stop control (EN)
The operation and stopping of the motor can be controlled by the on-off of the control terminal EN relative to COM.When connected with the terminal, the motor will stop.When the running/stopping end is used to control the motor to stop, the motor starts and stops according to the starting time set by the panel, and its motion law is affected by the load inertia.
(3) motor forward/reverse control (F/R)
The running direction of the motor can be controlled by controlling the on-off of terminal F/R and terminal COM.When F/R is not connected with the terminal COM, the motor will run clockwise (facing the motor shaft), otherwise, the motor will run counterclockwise: when the motor is in the running state for forward/reverse selection and switching, the motor will automatically stop and then start the operation in the opposite direction.
Brake (BR)
The brake stop of the motor can be controlled by controlling the on-off of terminal BR and terminal COM.When the control terminal BK is disconnected from the terminal COM, the motor will run and stop when the motor is connected. In case of frequent overvoltage alarm in the drive, the brushless drive shall be equipped with brake resistance, with recommended resistance value of no less than 100 ohms and power of no less than 100W. During installation, the drive must be in the state of power off and the indicator light off.Additional brake resistance is optional and will be charged separately.
(5) motor speed signal output (PG)
Speed pulse output, the port is OC output (30V/10mA Max).PG end with the power of the indirect 3 k Ω ~ 10 k Ω pull-up resistor.The relationship between the output frequency F (HZ) and the motor speed N(RPM) is as follows: F=N * P / 60, where P is the number of motor poles, that is, the pulse output per revolution of the motor is the number of poles of the motor.
(6) alarm output
Driver alarm output, the port is OC output (30V/10mA Max).Alarm output end and the power of the indirect 3 k Ω ~ 10 k Ω pull-up resistor.When alarming, this terminal conducts with GND (low level), and at the same time, the driver stops working by itself and is in the alarming state.
4.2 working mode:
There are three working modes of the driver, which can be set by the panel.Second is the external port working mode;Motor in accordance with the setting mode, digital tube display motor speed.In the working mode of the panel, press R/S key to start and stop the motor, long press + and - keys to increase and decrease the motor speed, and press given ENTER key to determine the motor speed.The motor runs at the set speed.The third is communication.
4.3 protection mode:
When the motor in the process of operation, abnormal, digital tube display.
(1) OL means the motor is blocked.
(2) OC stands for over current.
(3) HE means hall fault.
(4) LV represents input undervoltage.
(5) HU means input overvoltage.
(6) EE means IPM module fault protection.
(7) OT means motor overheating.
V. system usage:
Firstly, connect the connection line (motor winding line, hall signal line and power line) between the motor and the driver, and the connection line must be strictly in accordance with the requirements. Unlike asynchronous motor, positive and negative rotation can not be realized by changing the connection line. Incorrect connection will lead to the motor not running, or abnormal operation, which may damage the motor and the driver.
When the motor power of wires, HALL and connect the power cord drive, can, to set up the motor control panel control or port control, and then set the brushless motor of logarithmic (incorrect polar logarithmic display speed, and the internal parameters call errors), and then press start switch, potentiometer slightly increase motor, the motor should be run, such as the motor is not running, or shiver, or device alarm, the possibility of electrical wiring is wrong or the external load is too big, please check again brushless motor and external load, and can realize the normal movement of the motor, stop.