一 概述:
高壓無刷電機驅(qū)動器是為配合現(xiàn)代化工業(yè)自動控制領(lǐng)域而自主研發(fā)的大功率驅(qū)動器,主要采用國外高性能專用無刷直流電機驅(qū)動芯片,組成具有集成度高、體積小、保護完善、接線簡潔明了、可靠性高等一系列優(yōu)點。該驅(qū)動器適合驅(qū)動額定功率在400W以下的中小型無刷直流電機。該驅(qū)動器采用新型的PWM技術(shù),使無刷電機運行速度高,振動小,噪聲低,平穩(wěn)性好,可靠性高。
二 產(chǎn)品特征:
1. 系統(tǒng)特性:
輸入電源 AC85~265VAC 50/60Hz
連續(xù)輸出電流: 2.5A,適合550W以下的無刷電機
最大輸出電流: 5.0A
使用溫度 0~+45°C
保存溫度 -20~+85°C
使用及保存濕度 <85% [不結(jié)霜條件]
構(gòu)造 壁掛箱體式
2. 基本特性
冷卻方式 : 散熱器方式
控制信輸入輸出信號 :全隔離
保 護 機 能: 過電流、過熱過速度過電壓欠壓控制電源異常
3. 安裝注意事項
* 運行期間嚴(yán)禁打開外殼測量或觸摸底板上任何器件和接插件。
* 斷電后1分鐘后才能進行底板檢查或更換保險管。
* 運行期間嚴(yán)禁驅(qū)動器無外殼運行。
* 無刷電機驅(qū)動器和無刷電機需良好可靠接地,否則有可能無刷電機轉(zhuǎn)速不平穩(wěn)。
* 如果驅(qū)動器在運行期間意外損壞,本公司只負責(zé)承擔(dān)驅(qū)動器在保修范圍內(nèi)的維修和更換。本公司不承擔(dān)由于驅(qū)動器意外損壞導(dǎo)致的電機失控或人員傷亡以及財產(chǎn)損失等的賠償。
三.安裝尺寸 165*102*52mm
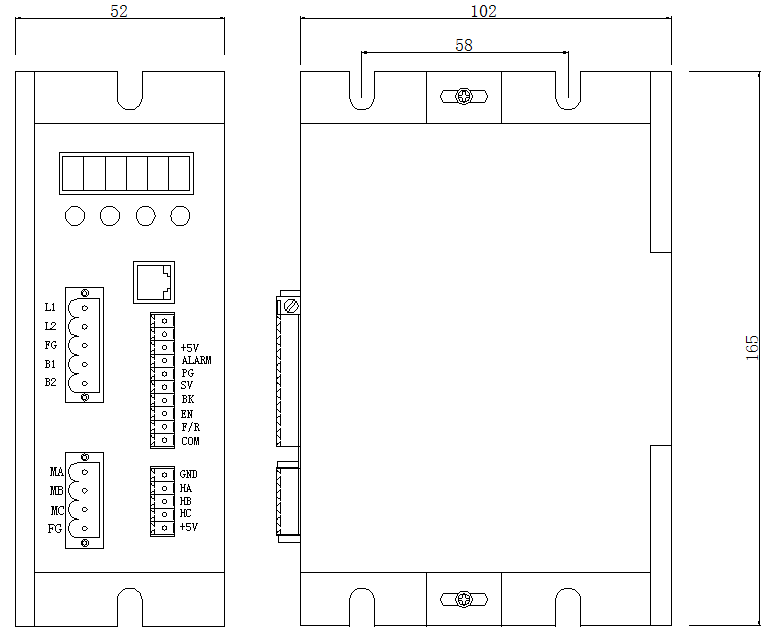
四.接口及控制信號
控制接口
序號 | 名稱 | 說明 |
1 | 預(yù)留 | 預(yù)留端口 |
2 | 預(yù)留 | 預(yù)留端口 |
3 | +5V | +5V電源輸出端口 |
4 | ALARM | 報警輸出端 |
5 | PG | 速度信號輸出端 |
6 | BK | 控制信號剎車端(對應(yīng)COM) |
7 | EN | 啟動停止(對應(yīng)COM) |
8 | SV | 模擬量信號輸入端口 |
9 | F/R | 正反轉(zhuǎn)控制端(對應(yīng)COM) |
10 | COM | 公共端口 |
無刷電機霍爾傳感器信號端
序號 | 名稱 | 說明 |
1 | GND | 霍爾傳感器電源地線 |
2 | HA | 霍爾傳感器A相 |
3 | HB | 霍爾傳感器B相 |
4 | HC | 霍爾傳感器C相 |
5 | +5V | 霍爾傳感器電源輸入端 |
電源和電機接線端
序號 | 名稱 | 說明 |
1 | L1 | 交流220VAC |
2 | L2 | 交流220VAC |
3 | FG | 地線 |
4 | B1 | 預(yù)留外接剎車電阻端口 |
5 | B2 | 預(yù)留外接剎車電阻端口 |
序號 | 名稱 | 說明 |
1 | MA | 電機繞組A相(MA) |
2 | MB | 電機繞組B相(MB) |
3 | MC | 電機繞組C相(MC) |
4 | FG | 地線 |
五、功能與使用
調(diào)速方式
本驅(qū)動器提供以下下面調(diào)速方式:
面板調(diào)速:通過設(shè)置驅(qū)動器的內(nèi)部速度參數(shù)來達到不同的轉(zhuǎn)速。
外部輸入調(diào)速將外接電位器的兩個固定端分別接于驅(qū)動器的GND和+5v一端,將調(diào)節(jié)端接于SV端即可使用外接電位器(5K~100K)調(diào)速,也可以通過其它的控制單元(如PLC、單片機等)輸入模擬電壓到SV端實現(xiàn)調(diào)速(相對于GND),SV端口的接受范圍為DC OV~+5V,對應(yīng)電機轉(zhuǎn)速為0~額定轉(zhuǎn)速。
也可使用外部數(shù)字信號調(diào)速:在SV 與GND 之間可以施加幅值為5V,頻率為 1KHz~2KHz 的脈寬數(shù)字信號(PWM)進行調(diào)速,電機轉(zhuǎn)速受其占空比線性調(diào)節(jié)。這時可以通過調(diào)整 R-SV 電位器對SV 數(shù)字信號幅值進行0~1.0 比率 衰減處理,一般將 R-SV 調(diào)到1.0,對SV 輸入數(shù)字信號不做衰減處理。
電機運行/停止控制(EN)
通過控制端子EN相對于GND的通、斷可以控制電機的運行和停止。當(dāng)端子斷開時電機運行反之電機停止。使用運行/停止端控制電機停止時,電機為自然停車,其運動規(guī)律與負載慣性有關(guān)。
電機正/反轉(zhuǎn)控制(F/R)
通過控制端子F/R與端子GND的通、斷可以控制電機的運轉(zhuǎn)方向。當(dāng)F/R與端子GND不接通時,電機順時針運行(面對電機軸),反之則電機逆時針方向運轉(zhuǎn);為避免驅(qū)動器的損壞在改變電機轉(zhuǎn)向時,應(yīng)先使電機停止運動后,再操作改變轉(zhuǎn)向,避免在電機運行中進行運轉(zhuǎn)方向操作。
制動停機(BREAK)
通過控制端子BK扮與端子GND的通、斷可以控制電機的制動停機。當(dāng)控制端子BK與端子GND斷開時,電機運行,接通時電機快速制動停止,制動停機比自然停機快,具體停機時間與用戶系統(tǒng)的負載慣量有關(guān)。因制動停機對電氣和機械均有沖擊,如無特殊停機要求應(yīng)采用自然停機。
電機轉(zhuǎn)速信號輸出(PG)
速度脈沖輸出,該端口為OC 輸出(30V/10mA max),要得到信號應(yīng)與電源之間接 3KΩ~10KΩ上拉電阻。該端將輸出頻率與電機轉(zhuǎn)速成正比的固定脈 寬 (50uS)負脈沖串,電機每轉(zhuǎn)的輸出脈沖個數(shù)為3 x N, N 為電機的極數(shù)。例:2對極即四極電機每轉(zhuǎn)2個脈沖.當(dāng)電機轉(zhuǎn)速為500轉(zhuǎn)/分時端子PG的輸出脈沖為1000個。
報警輸出
驅(qū)動器報警輸出,該端口為OC 輸出(30V/10mA max)。要得到信號應(yīng)與電源之間接 3KΩ~10KΩ上拉電阻。報警時該端與GND 導(dǎo)通(低電平),同時驅(qū)動器自行停止工作處于報警狀態(tài)。
驅(qū)動器故障
驅(qū)動器內(nèi)部出現(xiàn)過壓或過流時驅(qū)動器進入保護狀態(tài),驅(qū)動器會自動停止工作,電機停止,驅(qū)動器上的藍燈為閃礫,只要將使能端重新復(fù)位(即EN與GND斷開)或是斷電,驅(qū)動器才能解除報警。發(fā)生此故障請檢查電機接線。
驅(qū)動器與無刷電機接線圖
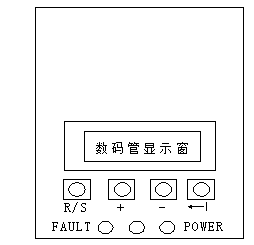
六.顯示及鍵盤操作
注: “R/S”: 表示啟動/停止 (返回鍵)
“+”: 設(shè)置參數(shù)時參數(shù)數(shù)值加1
“-”: 設(shè)置參數(shù)時參數(shù)數(shù)值減1
“←∣: ENTER” 確認鍵 (調(diào)出系統(tǒng)參數(shù))
按鍵位置如上圖所示:
6.1 系統(tǒng)參數(shù)設(shè)定方式:
1.系統(tǒng)參數(shù)設(shè)定必須在電機停機狀態(tài),即面板模式時電機為停止?fàn)顟B(tài)或是外部端口模式時處于使能斷開狀態(tài),在待機情況下,按“ENTER”鍵;會調(diào)出系統(tǒng)參數(shù),再按ENTER鍵,會調(diào)出系統(tǒng)參數(shù)的設(shè)置值。
2.按 “+”或“-”鍵調(diào)到希望修改的參數(shù)。如果不想修改按“R/S”鍵跳出設(shè)定,回到待機狀態(tài)。
3.再按“ENTER”鍵會見到參數(shù)內(nèi)容。如果不想修改按“R/S”鍵跳出設(shè)定,回到待機狀態(tài)。
4. 按 “+”或“-”鍵調(diào)整希望修改的參數(shù)數(shù)值。
5. 按“ENTER”鍵存儲參數(shù),按R/S鍵回到待機狀態(tài)。
說明:在設(shè)置狀態(tài),如果一分鐘沒有按鍵按下會自動跳到轉(zhuǎn)速顯示界面。
6.2 工作模式:
驅(qū)動器的工作模式有兩種,可通過面板設(shè)置,其一是面板工作模式;其二是外部端口工作模式;電機按照設(shè)定方式工作,數(shù)碼管顯示電機運轉(zhuǎn)轉(zhuǎn)速。在面板工作模式下,按R/S鍵啟動、停止電機,長按住+、-鍵增加、降低電機轉(zhuǎn)速,按←∣ENTER鍵確定電機轉(zhuǎn)速。電機按設(shè)定轉(zhuǎn)速運行。
6.3 保護模式:
當(dāng)電機在運行過程中出現(xiàn)異常,數(shù)碼管顯示Err×。
(1)Err1表示電機堵轉(zhuǎn)。
(2)Err2表示過電流。
(3)Err3表示霍爾故障。
(4)Err4表示輸入欠壓。
(5)Err5表示輸入過壓。
(6)Err6表示輸入峰值電流保護
6.4 說明:
(1)POWER電源指示燈
亮表示電源正常;滅表示電源異常;
(2)FAULT狀態(tài)指示燈
滅表示設(shè)置模式;亮表示工作模式;閃表示保護模式。
6.5 驅(qū)動器詳細參數(shù)設(shè)置:
| P00X組:系統(tǒng)運行參數(shù) |
| 功能碼 | 名稱 | 設(shè)定范圍 | 單位 | 出廠設(shè)定 | 更改 |
| P000 | 控制方式設(shè)置 | 00為外部端口控制方式 |
| 0 |
|
| 01為面板控制方式 | 外部端口控制方式 |
| 03 RS485通訊端口控制 |
|
| P001 | 極對數(shù)設(shè)置 | 1~99 | 對極 | 2 | ○ |
| P002 | 額定轉(zhuǎn)速設(shè)置 | 1~9999 | RPM | 3000 | ○ |
| 對外部端口模式有效 |
| P003 | 最大電流設(shè)置 | 0.5~2.0 | A | 2 | ○ |
| P004 | 面板運轉(zhuǎn)轉(zhuǎn)速 | 0~額定轉(zhuǎn)速 | RPM | 3000 | ○ |
| 僅對面板模式有效 |
| P005 | 啟動時間設(shè)置 | 0.2~10.0 | S | 2 | ○ |
| P006 | 停止時間設(shè)置 | 0.2~10.0 | S | 2 | ○ |
| P007 | 開閉環(huán)控制 | 00開環(huán) |
| 01閉環(huán) | ○ |
| 01閉環(huán) |
| P008 | 有感/無感控制 | 00無感 |
| 01有感 |
|
| 01有感 |
| P009 | 顯示模式設(shè)置 | 00 顯示實時轉(zhuǎn)速 |
| 0 |
|
| 01顯示實時電流(DC) |
| P00A | 無感啟動初始轉(zhuǎn)速 | 0-FFFFH | 十六進制 | 0300H | 不可更改 |
| P00B | 無感啟動轉(zhuǎn)矩 | 0-FFH | 十六進制 | 60H | 不可更改 |
| P00C | 預(yù)留 | 0-FFH | 十六進制 | 10H | 不可更改 |
| P00D | 電機霍爾角度選擇 | 120度:00 60度:01 |
| 0 | 不可更改 |
| P00E | 預(yù)留 | 0-FFH | 十六進制 | 0 | 不可更改 |
| P00F | 預(yù)留 | 0-FFH | 十六進制 | 0 | 不可更改 |
注:P007、P008參數(shù)修改保存完成后,驅(qū)動器必需斷電重啟方可進入設(shè)定控制模式狀態(tài)。AC電流==顯示實時DC電流/功率因數(shù)Q。
六、 系統(tǒng)使用:
首先接上電機和驅(qū)動器的連線(電機繞組線,霍爾信號線及電源線),必須嚴(yán)格按照要求連線,不能像異步電機那樣通過改變接線實現(xiàn)正反轉(zhuǎn),不正確的接線會導(dǎo)致電機運轉(zhuǎn)不正常,或者是不運轉(zhuǎn),主要表現(xiàn)有無刷電機運轉(zhuǎn)震動或發(fā)熱很快(幾十秒到兩分鐘,溫度上升到80度),并且會損壞電機及驅(qū)動器。
當(dāng)把電機電機繞組線,霍爾線和驅(qū)動器電源線連接好后,既可以試運行,先將電位器調(diào)至最小,然后按啟動開關(guān),輕微加大電機電位器,電機應(yīng)該運行,如電機不運行,或者發(fā)抖,有可能為電機線相序不對,請重新檢查無刷電機引線的順序,直至可以實現(xiàn)電機的正常運動,停止即可。
七、通訊方式:
通訊模式采用標(biāo)準(zhǔn)Modbus協(xié)議,符合國家標(biāo)準(zhǔn) GB/T 19582.1—2008。使用基于RS484雙線制串行鏈路通訊,物理接口采用通用電話端口,接線6對應(yīng)A,接線3對應(yīng)B,接線8對應(yīng)GND,串行連接非常方便。傳輸模式RTU,效驗?zāi)J紺RC,CRC起始字 FFFFH。數(shù)據(jù)模式8位異步串行,2停止位,無效驗位,支持多種通訊速率(具體見參數(shù)表)。
注意:如果需要通訊模式控制電機,必須在內(nèi)部調(diào)速模式下進行。
功能參數(shù)支持 03H多寄存器讀,10H多寄存器寫,41H狀態(tài)查詢。
寄存器定義:
1000H: H: 同P000 L:開環(huán)內(nèi)部調(diào)速值 0-100
1001H: H:閉環(huán)內(nèi)部調(diào)速值低位字節(jié) L:閉環(huán)內(nèi)部調(diào)速高位字節(jié)
1002H: H:未定義 L:未定義
1003H: H:閉環(huán)內(nèi)部調(diào)速最大值低位 L:閉環(huán)內(nèi)部調(diào)速最大值高位
1004H: H:位定義 1:EN啟停 2:BK剎車 3:FR方向(注意:其他位不可修改) L:報警狀態(tài) 00:無報警 81H:堵轉(zhuǎn) 82H:電流 83H:霍爾 84H:低壓
85H:高壓 86H:電流峰值
1005H: H:實時速度低位 L:實時速度高位
1006H: H:通訊波特率(同P000E) L: 未定義
1007H: H:站點地址 L:參數(shù)保存觸發(fā)字節(jié) 無意義
1008H--100FH: 不開放
1010H-1012H:MAC地址
例:(數(shù)據(jù)為16進制)
1.查詢速度及狀態(tài)
主機發(fā)送 01 41 c0 10 從機返回 01 41 00 00 08 0C 3A
返回 實時速度 00 00(同寄存器1005H) 控制狀態(tài) 08(同寄存器1004H高字節(jié))
2讀寄存值
主機發(fā)送 01 03 10 00 00 08 40 cc
從機返回 01 03 10 00 01 02 03 32 31 B8 0B 08 00 00 00 00 0D 01 00 05 1B
3. 讀寄存值1000H 1001H
主機發(fā)送 01 03 10 00 00 02 c0 cb
從機返回 01 03 04 00 01 02 03 EA 92
4. 讀控制位 1004H
主機發(fā)送 01 03 10 04 00 01 C1 0B
從機返回 01 03 02 0A 00 BE E4
5.寫控制1000H_H 模式寄存器,1000H_L 開環(huán)轉(zhuǎn)速 ,1001H 閉環(huán)轉(zhuǎn)速=L*256+H
寫速度2000
主機發(fā)送 01 10 10 00 00 02 04 01 00 D0 07 23 91
從機返回 01 10 10 00 00 02 45 08
寫速度1000
主機發(fā)送 01 10 10 00 00 02 04 01 00 E8 03 31 92
從機返回 01 10 10 00 00 02 45 08
6. 寫控制位 開機
主機發(fā)送 1 10 10 04 00 01 02 0A 00 B0 B5
從機返回 01 10 10 04 00 01 44 C8
7. 寫控制位 關(guān)機
主機發(fā)送 01 10 10 04 00 01 02 08 00 B1 D5
從機返回 01 10 10 04 00 01 44 C8












平穩(wěn)")
")



