一、概述
本系列控制驅動器為閉環速度型控制器����,采用最近型IGBT和MOS功率器����,利用直流無刷電機的霍爾信號進行倍頻后進行閉環速度控制���,控制環節設有PID速度調節器���,系統控制穩定可靠��,尤其是在低速下總能達到最大轉矩��,速度控制范圍150~20000rpm。
二���、特點
1、 PID速度�����、電流雙環調節器
2��、 有霍爾與無霍爾兼容�,自動識別,無感模式只適用特殊場合(啟動負載比較恒定)
3�、 高性能低價格
4��、 20KHZ 斬波頻率
5、 電氣剎車功能���,使電機反應迅速
6、 過載倍數大于2�,在低速下轉矩總能達到最大
7��、 具有過壓��、欠壓�、過流�、過溫、霍爾信號非法等故障報警功能
三�、電氣指標
建議標準輸入電壓:24VDC~48VDC, 欠壓保護點8VDC���,過壓保護點60VDC����。
最大連續輸入過載保護電流:15A���,出廠缺省設置為10A��。
加速時間常數 出廠值:0.5秒 其他可定制
安全注意事項
本產品屬于專業電器設備�,應由專業技術人員進行安裝���、調試�、操作和維護。不正確的使用將導致觸電、火災��、爆炸等危險���。
本產品為直流電源供電�,請確認電源正負極正確后上電
請勿帶電插拔連接線纜,且通電中不允許有線纜短接,否則將導致產品損壞
電機運行中如需改變方向,必須先減速致電機停止后�,再換向
驅動器非密封����,請勿在內部混入鏍絲��、金屬屑等導電性異物或可燃性異物���,儲存和使用時請注意防潮防塵
驅動器為功率設備��,盡量保持工作環境的散熱通風
保修限制
產品的保修范圍限于產品的器件和工藝(即一致性)����。
本公司不保證其產品能適合客戶的具體用途,因為是否適合還與該用途的技術指標要求和使用條件及環境有關。
四����、端子接口說明
1����、電源輸入端
| 引角序號 | 引角名 | 中文定義 |
| 1 | V+ | 直流正極輸入(+24-48v) |
| 2 | GND | 直流負極輸入 |
2�、電機輸入端
| 引角序號 | 引角名 | 中文定義 |
| 1 | MA | 電機A相 |
| 2 | MB | 電機B相 |
| 3 | MC | 電機C相 |
| 4 | GND | 地線 |
| 5 | HA | 霍爾信號A相輸入端 |
| 6 | HB | 霍爾信號B相輸入端 |
| 7 | HC | 霍爾信號C相輸入端 |
| 8 | +5v | 霍爾信號的電源端 |
3、控制信號部分
GND:信號地
F/R:正���、反轉控制,接GND反轉�����,不接正轉
EN:使能控制���;EN接地���,電機轉(聯機狀態)�����,EN不接�,電機不轉(脫機狀態)
BK:剎車控制�����;當不接地正常工作����,當接地時��,電機電氣剎車��。
SV:模擬量0-5vdc輸入端,控制電機轉速0~設定轉速�。
PG:電機速度脈沖輸出�����;當極對數為P時,每轉輸出3P個脈沖(OC門輸入)
ALM:報警輸出���;當電路處于報警狀態時,輸出低電平(OC門輸出)
+5V:調速電壓輸出�,可用電位器在SV和GND形成連續可調
通訊端口:RS485雙線制串行鏈路通訊��,可以通訊連接控制或是與電腦連接修改參數。
內置電位器R-SL:調節電機速度增益,從0~100%范圍內調速���。出廠設定最大速度是無刷電機單對極14000轉/分鐘,2對極7000轉/分鐘�,4對極3500轉/分鐘�����,8對極1750轉/分鐘。
內置電位器R-CS: 最大保護電流設定,內設電位器可設定0%~100%連續電流保護
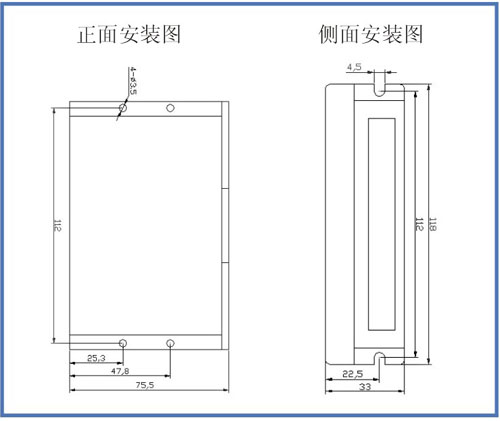
4�、機械安裝:
五��、功能與使用
調速方式
本驅動器提供以下三種調速方式用戶可任選一種:
內部電位器調速: 逆時針旋轉驅動器面板上的電位器電機轉速減小,順時針則轉速增大�����。用戶使用外部輸入調速時必須將電位器設于最小狀態���。
外部輸入調速將外接電位器的兩個固定端分別接于驅動器的GND和+5v一端��,將調節端接于SV端即可使用外接電位器(10K~50K)調速,也可以通過其它的控制單元(如PLC、單片機等)輸入模擬電壓到SV端實現調速(相對于GND),SV端口的接受范圍為DC OV~+5V�����,對應電機轉速為0~額定轉速����。
也可使用外部數字信號調速:在SV 與GND 之間可以施加幅值為5V,頻率為 1KHz~2KHz 的脈寬數字信號(PWM)進行調速��,電機轉速受其占空比線性調節���。這時可以通過調整 R-SI 電位器對SV數字信號幅值進行0~1.0 比率 衰減處理���,一般將 R-SI 調到1.0���,對SV 輸入數字信號不做衰減處理���。
還可以通過通訊方式以指令改變電機轉速����。
電機運行/停止控制(EN)
通過控制端子EN相對于GND的通、斷可以控制電機的運行和停止��。當端子斷開時電機運行反之電機停止����。使用運行/停止端控制電機停止時,電機為自然停車���,其運動規律與負載慣性有關。
電機正/反轉控制(F/R)
通過控制端子F/R與端子GND的通��、斷可以控制電機的運轉方向���。當F/R與端子GND不接通時�,電機順時針運行(面對電機軸),反之則電機逆時針方向運轉;為避免驅動器的損壞在改變電機轉向時,應先使電機停止運動后�,再操作改變轉向�����,避免在電機運行中進行運轉方向操作。
制動停機(BREAK)
通過控制端子BK扮與端子GND的通、斷可以控制電機的制動停機�。當控制端子BK與端子GND斷開時��,電機運行,接通時電機快速制動停止,制動停機比自然停機快����,具體停機時間與用戶系統的負載慣量有關���。因制動停機對電氣和機械均有沖擊��,如無特殊停機要求應采用自然停機。
電機轉速信號輸出(PG)
速度脈沖輸出����,該端口為OC 輸出(30V/10mA max)�,要得到信號應與電源之間接 3KΩ~10KΩ上拉電阻����。電機每轉的輸出脈沖個數為3 x N, N 為電機的極對數。例:2對極即四極電機每轉6個脈沖.當電機轉速為500轉/分時端子PG的輸出脈沖為3000個。
報警輸出
驅動器報警輸出,該端口為OC 輸出(30V/10mA max)�。要得到信號應與電源之間接 3KΩ~10KΩ上拉電阻����。報警時該端與GND 導通(低電平)�,同時驅動器自行停止工作處于報警狀態。
驅動器故障
驅動器內部出現過壓或過流等故障時,驅動器進入保護狀態,驅動器會自動停止工作,電機停止�����,驅動器上的紅燈為閃爍�,閃爍次數對應不同的故障現象�,只要將使能端重新復位(即EN與GND斷開)或是斷電,驅動器才能解除報警���。發生此故障請檢查電機接線或排除負載。
紅燈閃爍一次:電流過大報警
紅燈閃爍二次:電機霍爾故障
紅燈閃爍三次:電源欠壓報警
紅燈閃爍四次:電源過壓報警
紅燈閃爍五次:電機峰值電流報警
紅燈閃爍六次:電機堵轉報警
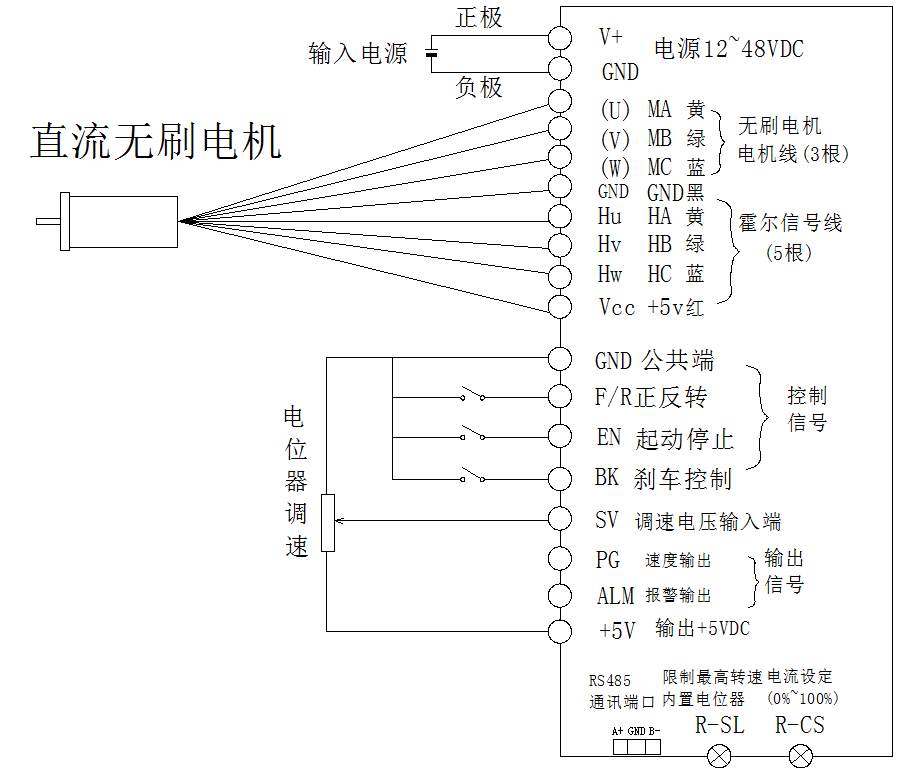
驅動器與無刷電機接線圖
六���、通訊方式:
通訊模式采用標準Modbus協議,符合國家標準 GB/T 19582.1—2008�。使用基于RS485雙線制串行鏈路通訊�,物理接口采用常規3針接線端口(A+,GND,B-)���,串行連接非常方便���。
如驅動器控制需要采用通訊模式�,需要把驅動器的控制模式改變,缺省模式是外部模擬調速方式��,改成通訊方式控制,需要通過RS485轉USB端口連接電腦�����,通過電機控制器設置工具程序修改�����。具體通訊指令及示例例程請通過銷售工程師索取。

















