一、概述
本控制驅(qū)動器為閉環(huán)速度型控制器,采用最新型IGBT和MOS功率器,利用直流無刷電機(jī)的霍爾信號進(jìn)行倍頻后進(jìn)行閉環(huán)速度控制,控制環(huán)節(jié)設(shè)有PID速度調(diào)節(jié)器,系統(tǒng)控制穩(wěn)定可靠,尤其是在低速下總能達(dá)到最大轉(zhuǎn)矩,速度控制范圍150~10000rpm。
二、特點(diǎn)
1、 PID速度、電流雙環(huán)調(diào)節(jié)器
2、 高性能低價格
3、 20KHZ 斬波頻率
4、 電氣剎車功能,使電機(jī)反應(yīng)迅速
5、 過載倍數(shù)大于2,在低速下轉(zhuǎn)矩總能達(dá)到最大
6、 具有過壓、欠壓、過流、過溫、霍爾信號非法等故障報(bào)警功能
7、 兼容無霍爾方式驅(qū)動,即可做無刷無霍爾驅(qū)動器單獨(dú)使用
三、電氣指標(biāo)
標(biāo)準(zhǔn)輸入電壓:24VDC~48VDC,最低電壓12VDC,最大電壓70VDC。
最大輸入過載保護(hù)電流:30A
連續(xù)輸出最大電流:15A
加速時間常數(shù) 出廠值:0.2秒
電機(jī)堵轉(zhuǎn)保護(hù)時間5秒,其他可定制
四、端子接口說明
1、電源輸入端
| 引角序號 | 引角名 | 中文定義 |
| 1 | V+ | 直流+24~48VDC輸入 |
| 2 | GND | GND輸入 |
2、電機(jī)輸入端
| 引角序號 | 引角名 | 中文定義 |
| 1 | MA | 電機(jī)A相 |
| 2 | MB | 電機(jī)B相 |
| 3 | MC | 電機(jī)C相 |
| 4 | GND | 地線 |
| 5 | HA | 霍爾信號A相輸入端 |
| 6 | HB | 霍爾信號B相輸入端 |
| 7 | HC | 霍爾信號C相輸入端 |
| 8 | +5V | 霍爾信號的電源線 |
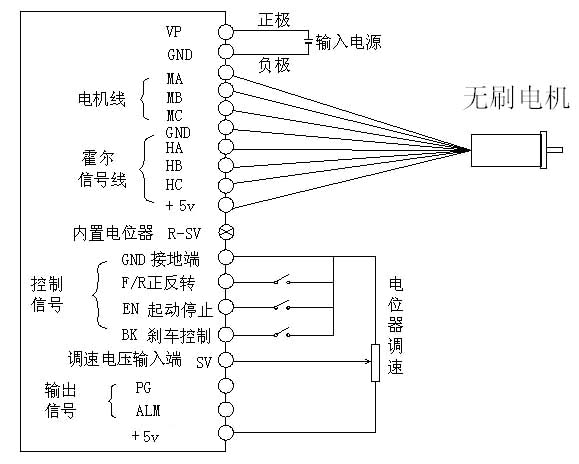
3、控制信號部分
GND:信號地
F/R:正、反轉(zhuǎn)控制,接GND反轉(zhuǎn),不接正轉(zhuǎn),正反轉(zhuǎn)切換時,應(yīng)先關(guān)斷EN
EN:使能控制:EN接地,電機(jī)轉(zhuǎn)(聯(lián)機(jī)狀態(tài)),EN不接,電機(jī)不轉(zhuǎn)(脫機(jī)狀態(tài))
BK:剎車控制:當(dāng)不接地正常工作,當(dāng)接地時,電機(jī)電氣剎車,當(dāng)負(fù)載慣量較大時,應(yīng)采用脈寬信號方式,通過調(diào)整脈寬幅值來控制剎車效果。
SV 模擬電壓輸入端:可以衰減從0~100%,當(dāng)外部速度指令接0~5V時,通過此端口可以調(diào)速試機(jī)
PG:電機(jī)速度脈沖輸出:當(dāng)極對數(shù)為P時,每轉(zhuǎn)輸出P個脈沖(OC門輸入)
ALM:報(bào)警輸出:當(dāng)電路處于報(bào)警狀態(tài)時,輸出低電平(OC門輸出)
+5V:調(diào)速電壓輸出,可用電位器在SV和GND形成連續(xù)可調(diào)
內(nèi)置電位器:調(diào)節(jié)電機(jī)速度增益,可以從0~100%范圍內(nèi)調(diào)速。
驅(qū)動器與無刷電機(jī)接線圖
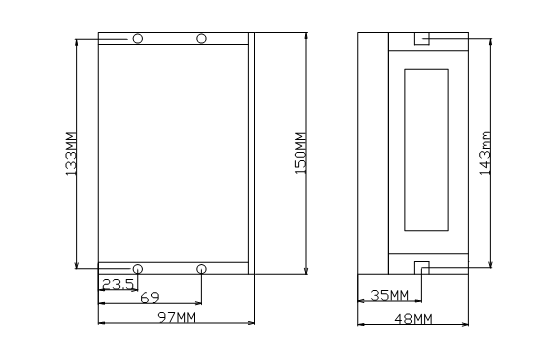
4.機(jī)械安裝:
五、功能與使用
調(diào)速方式
本驅(qū)動器提供以下兩種調(diào)速方式用戶可任選一種:
內(nèi)部電位器調(diào)速: 逆時針旋轉(zhuǎn)驅(qū)動器面板上的電位器電機(jī)轉(zhuǎn)速減小,順時針則轉(zhuǎn)速增大。用戶使用外部輸入調(diào)速時必須將電位器設(shè)于最小狀態(tài)。
外部輸入調(diào)速將外接電位器的兩個固定端分別接于驅(qū)動器的GND和+5v一端,將調(diào)節(jié)端接于SV端即可使用外接電位器(5K~100K)調(diào)速,也可以通過其它的控制單元(如PLC、單片機(jī)等)輸入模擬電壓到SV端實(shí)現(xiàn)調(diào)速(相對于GND),SV端口的接受范圍為DC OV~+5V,對應(yīng)電機(jī)轉(zhuǎn)速為0~額定轉(zhuǎn)速。
也可使用外部數(shù)字信號調(diào)速:在SV 與GND 之間可以施加幅值為5V,頻率為 1KHz~2KHz 的脈寬數(shù)字信號(PWM)進(jìn)行調(diào)速,電機(jī)轉(zhuǎn)速受其占空比線性調(diào)節(jié)。這時可以通過調(diào)整 R-SV 電位器對SV 數(shù)字信號幅值進(jìn)行0~1.0 比率 衰減處理,一般將 R-SV 調(diào)到1.0,對SV 輸入數(shù)字信號不做衰減處理。
電機(jī)運(yùn)行/停止控制(EN)
通過控制端子EN相對于GND的通、斷可以控制電機(jī)的運(yùn)行和停止。當(dāng)端子斷開時電機(jī)運(yùn)行反之電機(jī)停止。使用運(yùn)行/停止端控制電機(jī)停止時,電機(jī)為自然停車,其運(yùn)動規(guī)律與負(fù)載慣性有關(guān)。
電機(jī)正/反轉(zhuǎn)控制(F/R)
通過控制端子F/R與端子GND的通、斷可以控制電機(jī)的運(yùn)轉(zhuǎn)方向。當(dāng)F/R與端子GND不接通時,電機(jī)順時針運(yùn)行(面對電機(jī)軸),反之則電機(jī)逆時針方向運(yùn)轉(zhuǎn);為避免驅(qū)動器的損壞在改變電機(jī)轉(zhuǎn)向時,應(yīng)先使電機(jī)停止運(yùn)動后,再操作改變轉(zhuǎn)向,避免在電機(jī)運(yùn)行中進(jìn)行運(yùn)轉(zhuǎn)方向操作。
制動停機(jī)(BREAK)
通過控制端子BK扮與端子GND的通、斷可以控制電機(jī)的制動停機(jī)。當(dāng)控制端子BK與端子GND斷開時,電機(jī)運(yùn)行,接通時電機(jī)快速制動停止,制動停機(jī)比自然停機(jī)快,具體停機(jī)時間與用戶系統(tǒng)的負(fù)載慣量有關(guān)。因制動停機(jī)對電氣和機(jī)械均有沖擊,如無特殊停機(jī)要求應(yīng)采用自然停機(jī)。
電機(jī)轉(zhuǎn)速信號輸出(PG)
速度脈沖輸出,該端口為OC 輸出(30V/10mA max),要得到信號應(yīng)與電源之間接 3KΩ~10KΩ上拉電阻。該端將輸出頻率與電機(jī)轉(zhuǎn)速成正比的固定脈 寬 (50uS)負(fù)脈沖串,電機(jī)每轉(zhuǎn)的輸出脈沖個數(shù)為3 x N, N 為電機(jī)的極數(shù)。例:2對極即四極電機(jī)每轉(zhuǎn)6個脈沖.當(dāng)電機(jī)轉(zhuǎn)速為500轉(zhuǎn)/分時端子PG的輸出脈沖為3000個。
報(bào)警輸出
驅(qū)動器報(bào)警輸出,該端口為OC 輸出(30V/10mA max)。要得到信號應(yīng)與電源之間接 3KΩ~10KΩ上拉電阻。報(bào)警時該端與GND 導(dǎo)通(低電平),同時驅(qū)動器自行停止工作處于報(bào)警狀態(tài)。
驅(qū)動器故障
驅(qū)動器內(nèi)部出現(xiàn)過壓或過流時驅(qū)動器進(jìn)入保護(hù)狀態(tài),驅(qū)動器會自動停止工作,電機(jī)停止,驅(qū)動器上的藍(lán)燈為閃礫,只要將使能端重新復(fù)位(即EN與GND斷開)或是斷電,驅(qū)動器才能解除報(bào)警。發(fā)生此故障請檢查電機(jī)接線。
六、驅(qū)動器使用步驟
1、正確接好電機(jī)線,霍爾線及電源線。錯誤的接線會導(dǎo)致電機(jī)和驅(qū)動器損壞。
2、使用內(nèi)置電位器調(diào)速時,將EN接GND信號地,SV端口接+5V,用內(nèi)置電位器R-SV調(diào)速。
3、如使用外置電位器調(diào)速時,將R-SV調(diào)到1.0的位置,同時將EN接地,將外置電位器動點(diǎn)(中間接口)接驅(qū)動器SV端口,另兩個接GND及+5V端口。
4、通電運(yùn)行,此時電機(jī)處于閉環(huán)最高速狀態(tài),調(diào)整衰減電位器至所需要轉(zhuǎn)速。

廠家")
廠家")
廠家")
擊放大")







轉(zhuǎn)平穩(wěn)")
")

有限公司")
站二維碼")
站二維碼")